











一、前言
别看Hough变换似乎简单,但是,不发挥一下数学理论的功力是不可能理解的;本人早十几年前就用Hough,也一直想写Hough变换,但一懒就是10几年,乘春节前有空,就将Hough的详细细节揭秘出来,供大家参考。
二、 直线函数的形式化表示
2.1 直线被方程表示
在直角坐标系,任意一条直线的方程是

2.2 直线被图表表示
在现实图像中,我们可以把等式 看成一个表格,如图:
看成一个表格,如图:

2.3 直线的表格表示
以上直线方程构成表格是:

因此,以上用三种方法表示一个直线内容,也就是告诉我们,函数可以以多种方式存在,而计算机算法,常常以表格的方式解决问题为妥。而且从一种表格等价地转换成另一种表格。hough变换就是这样的实例。
三、hough变换的提出
以上方程,固定k和b,能够找出线上任意一个点,这是一个正向问题;逆向问题是,给出一群点(x,y);问这些点是否构成直线?
如果试图用计算机解决,那么需要找出某种条件模式,使得所有在直线上的点(x,y)满足这种条件,不在直线的点不满足这个条件。
这里首先要强调一个事实: 这个式子有多重含义,如果理解错了,就无法真正懂得houghj变换,本文将逐一讲述该式的三个场景,从而排除干扰,让大家真正懂得hough变换中的意义。
这个式子有多重含义,如果理解错了,就无法真正懂得houghj变换,本文将逐一讲述该式的三个场景,从而排除干扰,让大家真正懂得hough变换中的意义。
3.1 极坐标表示点和线
令一个极坐标系与直角坐标系在原点重合;在极坐标上表示 为
为
因此有:
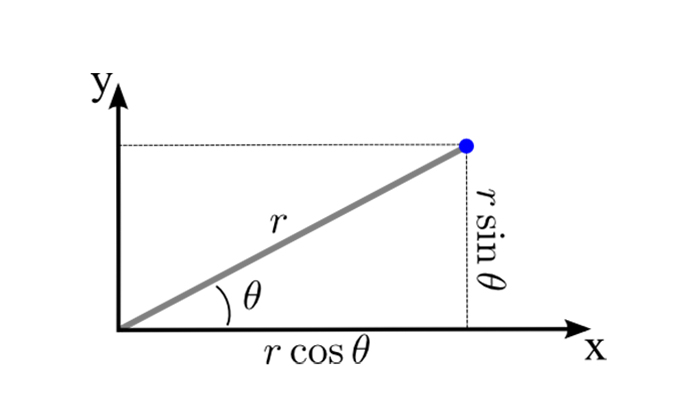

因此,

注意:以上2)式似乎很明确直观,但是这不是hough的要点。为了追究到底是个啥意思,这里专门列出三个意义,比较三个意义之后,才能肯定,哪个解释才是hough的本意。
下面将一一描述。
1)构成点:固定x,y,且 ;表示直角坐标点和极坐标的转换公式:
;表示直角坐标点和极坐标的转换公式:

以上(3)和(4)两个条件决定了 直角坐标点和极坐标的转换公式。显然,这里我们不是研究单点的,因而这个解释不是hough变换。
2)构成圆轨迹:把的x和y看成固定点,让 随意变动后,r构成圆轨迹
随意变动后,r构成圆轨迹
当上面条件(3)和(4)中,去掉(4),单独保留(3)是个啥?提前告诉大家是一个圆轨迹。证明如下:


令:


此为圆的极坐标方程,如图:

事实上,从P(x,y)引出的所有直线,都和此圆相交,如图:

结论1:所谓的就是给定P(x,y)点后,x和y固定,P与原点O构成线段为直径的圆的轨迹。
推论:过P点的任意直线,与过原点垂线的交点(垂足点),刚好落在圆上。
3)构成直线方程:给定任意直线,其到原点距离是固定的、从原点引出垂线方向角也固定
假设,有任意一条直线,如何在极坐标系表示这条直线的轨迹?

对于任意直线L,做L的垂线,且过原点,垂足为Q(x0,y0);OQ就是原点到L的距离;在直线L上找任意点P(x,y);显然OS=x;PS=y;做OS和PS到OQ的投影,投影线为OR和RQ(=ST),显然OR+ST=OQ;

结论:公式(7)的意义是,一条直线上所有的点都与一个r和一个 对应,这个解释才是我们这里hough变换所指的意义!
对应,这个解释才是我们这里hough变换所指的意义!
注意:很神奇! 居然有三种不同含义,以上三个解释全部摆出,经对比,式(7)才是我们要的hough变换的含义。
四、 hough变换的原理
4.1 极坐标的 表格
表格
将极坐标的r和以直角方式构建坐标,就成了表格平面;直角坐标平面x-y平面的任意点一 一对应于 平面的点。

在平面上,坐标是个 的有限区间,这是大大的有利条件!!!
的有限区间,这是大大的有利条件!!!
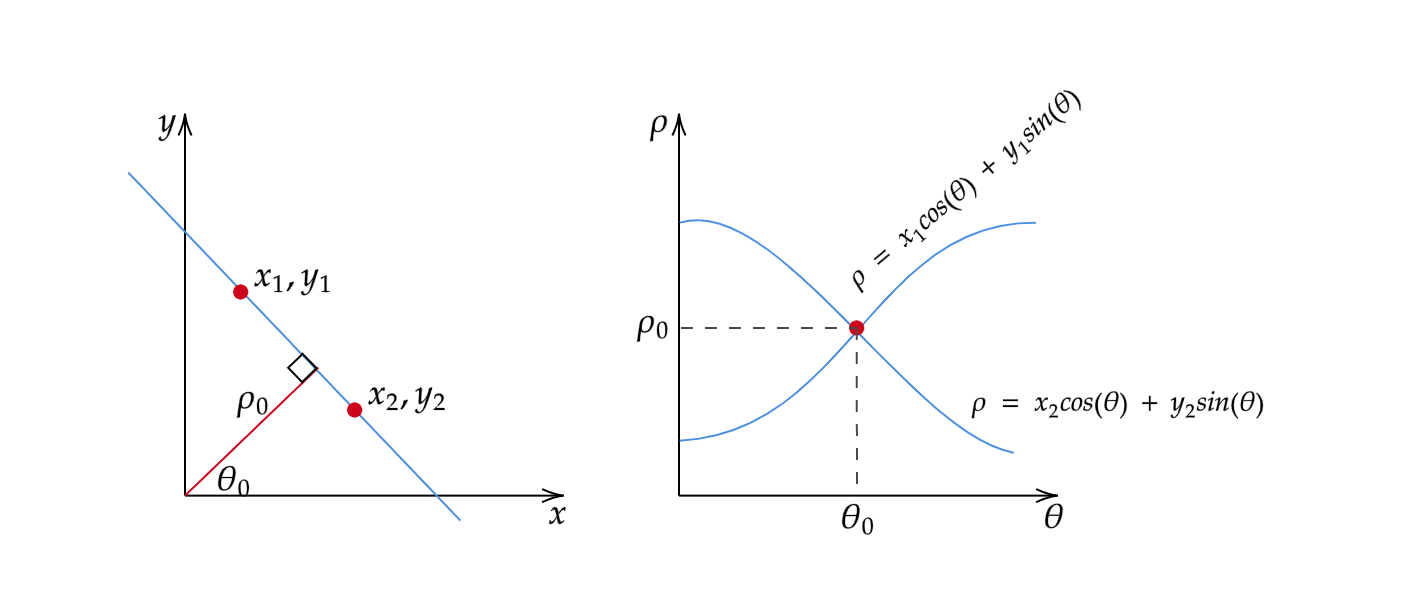
4.2 用平面表示:过任意点P(x,y)做所有射线,其过原点的垂足点的轨迹
如下图,Q1,Q2,Q3,... ... 就是这些射线的原点的垂足点,在 表格中表示成正弦曲线,
上图中的每一个P(x,y)决定一个圆,该圆在 平面上对应一条三角曲线(下图)。如果有N个点构成直线,那么,就有N条三角曲线,且交于共同的一个点。
4.3 构建hough算法表格( 在图)
1)构建 在平面,用矩阵M表示,M初始值赋值为0
2)在图像中选取目标像素的坐标(x,y)
3)在 中取一个序列,从序列中选取一个带入公式:
中取一个序列,从序列中选取一个带入公式:

求出一个r。
4)刷新M矩阵,将对应的 值加1.
值加1.
5)循环完成后,M矩阵的每个峰值对应一条直线。
五、图像处理中,Hough变换如何应用
如果将图片中所有点参与直线提取,是不可取的,因此,需要边缘提取后,然后二值化处理,使得线上点数量规模减小后,用hough变换。
- 预处理图像,首先边缘提取
- 然后阈值二值化,将边缘点挑选出来备用。
- 对边缘点进行hough变换,生成M矩阵
- 选取M中峰值,将线条对应点提取出。
5.1 python程序代码
- # coding=utf-8
- import cv2
- import numpy as np
-
- def rgb2gray(rgb):
- return np.dot(rgb[..., :3], [0.299, 0.587, 0.114])
-
- Gray = cv2.imread("d:/images/lines1.jpg",0)
-
-
- height,width = Gray.shape
- cv2.imshow("dsp",Gray)
- cv2.waitKey(0)
-
- point ={}
- num=0
- for i in range(height):
- for j in range(width):
- if Gray[i][j] !=0:
- point[num]=[i,j]
- num+=1
-
- triTable ={}
-
- for i in range(180):
- triTable[i]=[np.sin(i*3.14159/180),np.cos(i*3.14159/180)]
-
- len_cross = int( np.sqrt( width**2+ height**2))
- MtrScore = np.zeros([len_cross*2,180],np.int32)
-
- for i in range(num):
- ptmp = point[i]
- for j in range( 180 ):
- atmp = triTable[j]
- rou =int( ptmp[0]*atmp[0] + ptmp[1]*atmp[1] ) + len_cross
- # print(rou)
- MtrScore[rou][j] = MtrScore[rou][j]+ 1
-
- import seaborn as sns
- import matplotlib.pyplot as plt
- sns.heatmap( MtrScore )
- plt.show()
-
5.2 实验和效果1:输入直线图片

输出的 平面图:

5.3 实验效果2:输入一个点
输入下面图像,图的中部有一个白点,将其进行hough变换,看结果。

输出的 平面图:













 3335
3335



 回复
回复































